对象中,并将其返回,以便由 ROS 2 的启动系统加载并执行。通过代码的形式描述机器人的各个组件,以及组件之间的联动关系。运行起来会跳出一个界面,通过界面可以操作URDF中能动的关节。基于URDF的描述,通过RVIZ2...
”ROS2 机器人建模“ 的搜索结果
机器人控制 通过上一章节,学习了如何通过URDF描述一个机器人,现在开始学习如何控制这个机器人跑起来。 首先,先把那个圆柱体补全成一个差速结构的小车。 下面开始编辑URDF文件,添加其他link和joint,每次添加后,...
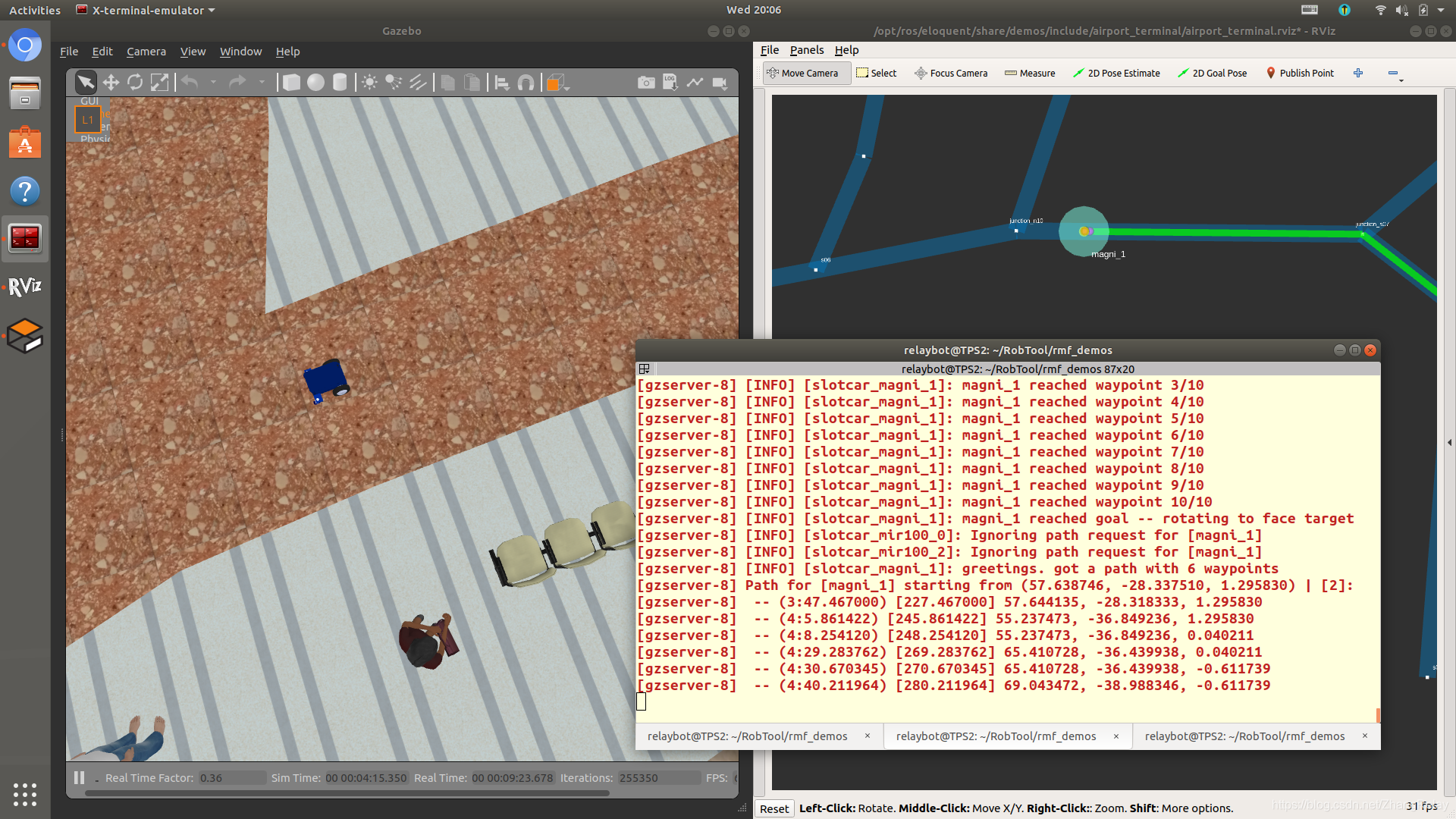
基于鱼香ROShttps://fishros.com/d2lros2/#/第三章的内容 搭建机器人系统,并在gazebo和rviz里进行仿真


#资源达人分享计划#



1.ROS2前世今生2.ROS与ROS2对比3.动手安装ROS24.ROS2初体验。
此外,通过使用ROS进行机器人建模和仿真,可以更好地理解机器人系统的各个组件之间的交互和通信,从而更好地设计和调试机器人系统的软件架构。 另外,机器人建模和仿真还可以帮助工程师实现快速迭代和开发,因为在...
ROS实践-机器人建模
标签: linux

机器人操作系统ROS(十):机器人建模
ROS——URDF机器人建模
标签: URDF
文章目录构建机器人系统URDF机器人建模 构建机器人系统 执行机构的实现 机器人底盘,电机,舵机 驱动系统的实现 电源子系统,电机驱动子系统,传感器接口 内部传感系统的实现 控制系统的实现 外部传感系统的...

#资源达人分享计划#
复习
#资源达人分享计划#



在阅读本文之前,推荐阅读前篇ROS机器人TF基础和全部资料文档: TF基础:https://blog.csdn.net/ZhangRelay/article/details/108374509 全文档:https://blog.csdn.net/ZhangRelay/article/details/108192167 所有...

一般情况下,URDF由声明信息和两种关键组件共同组成上面我们介绍完了link,那一个link该怎么写呢?我们来看一个base_link的写法,通过link标签即可声明一个link,属性name指定部件名字
虽然学完了基础篇和机器人学内容,但至今你还没有在我们的课程里看到机器人的影子,请不要郁闷,因为从本章开始,我们将会对...本章我们将通过机器人建模语言——URDF创建简单的机器人模型,并实现在RVIZ2中的可视化。
ROS URDF机器人建模 创建URDF模型 (1)创建机器人描述功能包 catkin_create_pkg mrobot_description urdf xacro (2)mrobot_description下创建urdf, launch文件夹,在urdf文件夹内放置机器人模型的 URDF或xacro文件。...
如何使用这样一个文件描述机器人呢?...ROS中的建模方法叫做URDF,全称是统一机器人描述格式,不仅可以清晰描述机器人自身的模型,还可以描述机器人的外部环境,比如这里的桌子,也可以算作一个模型。
什么是URDF机器人建模 Unified Robot Description Format:统一机器人描述格式 使用XML格式描述机器人模型 由n个link连杆和n个joint关节描述 二. Link和Joint详解 link内容 描述机器人某个刚体部分的外观和物理...
推荐文章
- jquery Select2 学习笔记之中文提示 - 程序员宅基地-程序员宅基地
- ADO数据库编程 - 总结-程序员宅基地
- tensorflow学习笔记(1)- tf.estimator.EstimatorSpec源码分析_tf.estimator.estimatorspec export_outputs-程序员宅基地
- delete called on non-final ‘xxx‘ that has virtual functions but non-virtual destructor-程序员宅基地
- urllib.error.URLError:urlopen error unknown url type:https 解决办法_urllib.error.urlerror: <urlopen error unknown url -程序员宅基地
- 行政法学-第十一章:行政复议-程序员宅基地
- FX3U-1PG使用_fx3u1pg模块程序-程序员宅基地
- 一些实用工具类Util-程序员宅基地
- 2009年三季度上市公司报表2-程序员宅基地
- Tesseract-OCR 字符识别---样本训练_tesseract-ocr训练自己数字样本-程序员宅基地